
Najbolji članovi

Popularan sadržaj
Showing content with the highest reputation on 03/22/18 u svim oblastima
-

Šta trenutno slušam . . .
Woland i jedan drugi je reagovao/la na Zen Mod za temu
al pajz ovu ekipu (nema najboljeg bubnjara ......)2 poena -

Beta 24
Dual i jedan drugi je reagovao/la na shonne za temu
to li ovako nesto? 2 poena
2 poena -

Turntable Tachometer / Controller
sir Oliver je reagovao/la na InSides za temu
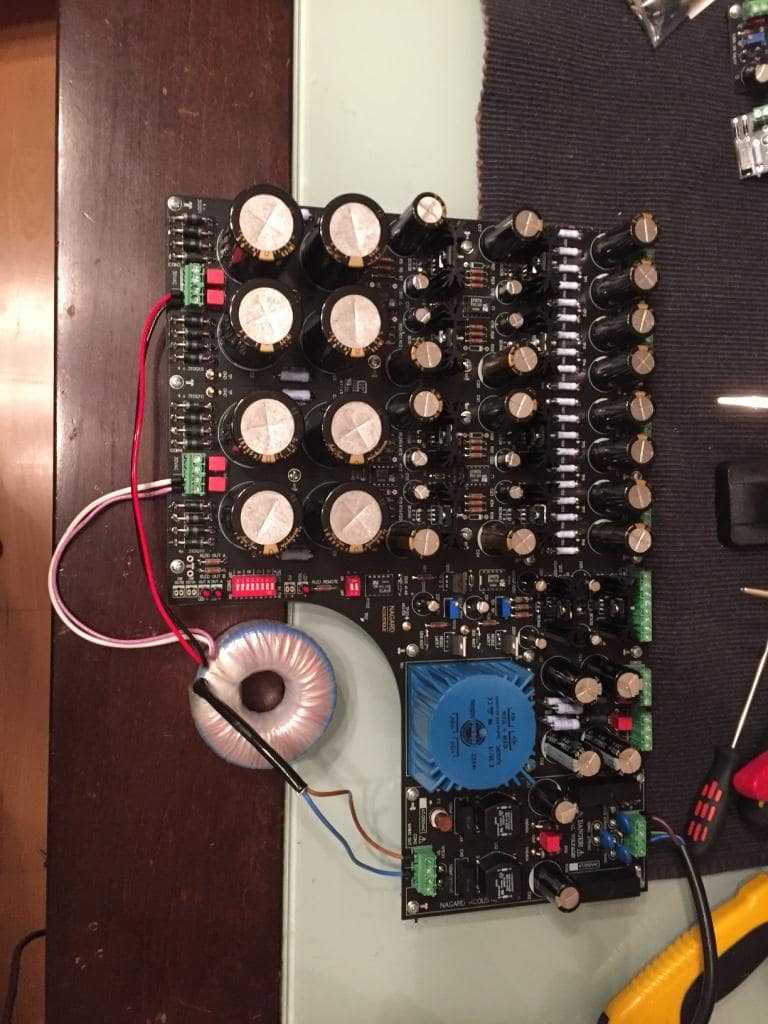
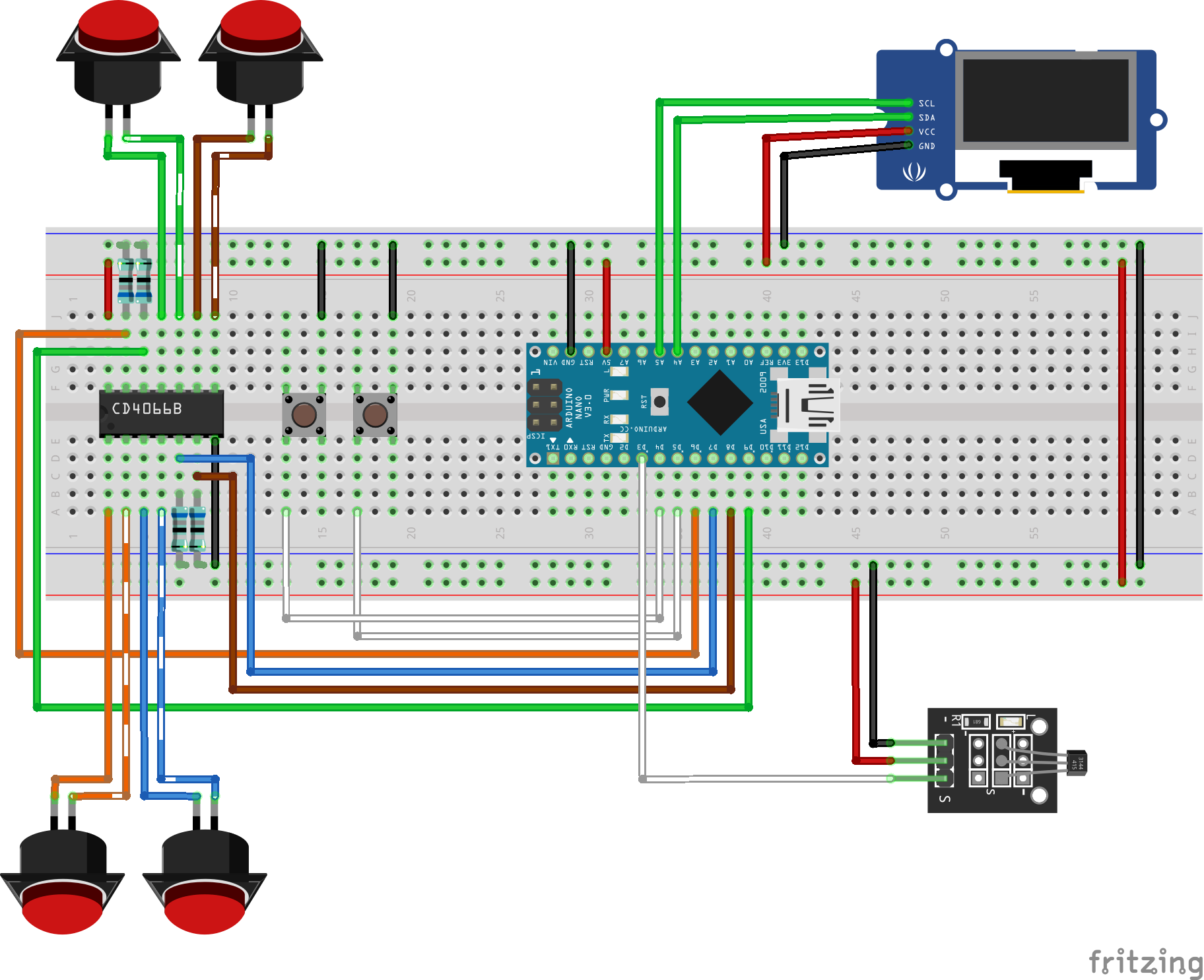
Увод Никад ми није било јасно како скоро сви произвођачи грамофона тврде да је константна брзина окретања грамофона кључна за контролу pitch-а, а веома мали број њих развија и/или имплементира склопове за тековно мерење исте. Уместо тога, користе се технике контроле обртаја код мотора и мерење истих, прерачун ротација преко мерење повратних струја итд. Шта ли се онда дешава на самом тањиру? Такође је било прича да грамофонска игла при контакту са плочама има утицај на константну брзину, а да не помињем растезање каиша и промене у температури. Како сам решио да развијам свој грамофон (*), морам сам да проверим ове хипотезе, да се не би базирао на приче које нису поткрепљене јасним доказима. (*) Рецимо да је стабилна просечна брзина ротација један (поред доста других) од кључних услова при развоју грамофона. Услови Поставио сам следеће услове: Безконтактни сензор (hall effect, IR, laser); Висока прецизност (рецимо микросекунде); Вањски дисплеј (OLED, LCD, ePaper); Логирање мерења за debugging и даљи развој погона за грамофон; Израда од релативно доступних компоненти; Могућност имплементација на било којем грамофону (**). (**) Локација монтирања сензора и окидача зависи од зазора између доње стране тањира и базе. Компоненте Скоро све компоненте се могу локално наручити, осим дисплеја. Било која комбинација од оних које сам навео врши посао. На крају, избор је пао на следеће: Arduino Nano (овде); Keyes KY-003 Hall Effect Sensor Breakout (овде); 0.91" OLED екран са I2C протоколом (рецимо овде); Неколико магнета (6mm x 3mm је добра величина); (***) CD4066B прекидач; (***) Стандардни тастери. (***) Нису потребни за тахометар, већ за други део пројекта, а то је PI/PID контрола вањског контролера за погон грамофона. TBD. Принцип Свако окидање сензора снима број микросекунди прошле од иницијализације микроконтролера. И онда: Брзина ротације је разлика између нове и старе вредности, изразене у ротацијама у минути; Сензор је један, и је фиксне локације; Окидач(и) сензора могу да буду од један до онолико колико их физички стане на тањиру; Када је више од једног окидача по ротацији, брзина ротације се рачуна за сваки окидач понаособ, а не као разлику између окидача. (****) (****) Сваки сензор има време окидања. У случају hall effect сензора, време окидања зависи од снаге магнетног поља које презентују магнети који раде као окидачи. Чак и да имам услове да поставим магнете са апсолутном прецизношћу, не могу да гарантујем да сви магнети имају магнетно поље исте јачине. Због тога, код који сам развио рачуна сваки магнет као да је једини окидач у систему, и упоређује га са самим себе. Овај приступ гарантује виш ступањ прецизности, и умањује утицај прецизности постављања окидача - све док се окидачи поставе на исто растојање од центра како би окинули сензор. Повезивање (*****) За тахометар, без вањске контроле погона, све што је лево од Ардуина се може уклонити. Окидачи Окидачи се могу поставити на доњу страну тањира, или на сам обод тањира ако нема места за испод. Код мене, то сам овако урадио: Програмирање Сав код (као и идуће промене) је доступан овде: https://github.com/stojnev/dwr-controller Код је релативно једноставан, а сви оперативни параметри се могу штимати преко вредности променљива: int countMessageDisplaySpins = 1; int waitingCycle = 0; long stoppingTime = 2500000; // Indicates (1) the number of rotations a display message is active before being replaced with RPM, (2) represents intermediary counter and (3) determines the amount of microseconds elapsed after which the platter is considered stopped. int triggerNumber = 4; // Indicates the number of sensor triggers per rotation. int correctionSpin = 4; int correctionSpinShort = 2; long correctionSpinCount = 0; int correctionMovement = 5; // Indicates (1) number of rotations to wait for applying correction with small corrections, (2) number of rotations to wait for applying correction with large corrections, (3) temporary spin count and (4) maximum amount of steps to correct per cycle. float correctionQ = 0.01; // Indicates the difference quotient from standard speed to activate automatic correction. float derivedQ = 0.01; // Indicates the correction in RPM derived from a single 0.01Hz step (single "click"). Код је дизајниран да очекује промене у систему, па тако "препознаје" стање система. То је важно за имплементацију у постојеће системе, где тахометар није контролер брзине и/или стања. Радња И на крају, како то ради: Будућност Тек смо почели. У плану је бар следеће: Имплементација Timer2_Counter библиотеке за повећање прецизности система; Рутине за приказ разних просека; Аутоматскo штимање PI/PID параметара; Рутине за чување укупног времена свирања (не само ротација).
1 poen -

Lepota dizajna
Vix je reagovao/la na sir Oliver za temu
Ko voli velike Zen nemo da gledaš1 poen -

Zanimljive, smešne i čudne fotografije
chakija je reagovao/la na aaa zmaju! za temu
: Послато са GT-I9300I уз помоћ Тапатока1 poen -
btw. proverio sam , kucka agresorska stvarno pazario Garrard 401 tacno moram da nabavim jos koji par zvucnjaka , da me mine depresija i ambecijum1 poen
-
a jes , garant i on frippuje na Quad1 poen
-
kad smo vec tu , moze i KC citanka , onako za uvod
1 poen
-
Ono jes' vala, nismo stigli, ali ja stigoh nekako kuci, pa pripremam popodnevno/vecernji LP set. Uhhhhh, Stratus kazes @Woland-e. E pa jeste to nekako bio hit na toj ploci, ali ja sam sentimentalno vezan za 2 numere sa tog legendarnog albuma ( specijalno ova druga, tj. Le Lis ).1 poen
-
Ovo prvo, Project Everest DD55000, slusao davne 1990, Hi-Fi show, Freemantle W.A., opasno sviralo na Accuphase mono blokovima.1 poen
-
Yeeeeeep Međutim, izdvaja se jedan . . .1 poen
-
ma, Santanini perkusionisti, bilo koji od 69 do danas1 poen
-
I danas . . . trenutno . . . takođe vanserijski dobošar1 poen
-
1 poen
-
volim ja Gingera ......... valjda nema coveka na planeti koji je vise puta cuo ( pa i zaredom/repeat) Cream Live nego ja ........ ali kad smo kod bubnjara ja jednostavno ne mogu da se odlucim koji mi vise lezi ......... al' definitivno jedan je Buddy1 poen
-

Novopridosle skalamerije
black coffe je reagovao/la na Spachek za temu
Cemu sluzi majca[emoji16] Sent from my SM-A500FU using Tapatalk1 poen -
Prema radarskim osmatranjima, očekuje se da u naredna dva sata grtalica izađe iz kružnog toka   . .1 poen
-
Čime se zanimam... (ovih dana )
Beli_Ninja je reagovao/la na InSides za temu
3D принтани део за механизам за корекцију азимута. Ручица сада користи делове на (1) стругу, (2) глодалици, (3) waterjet-у и (4) 3D принтеру. Зашто 3D принтер? Зато што је (1) најјефтинији, (2) најбржи и (3) најпоузданији метод за овај конкретан део. (*) На слици су два комада, за сваки случај - ручица користи само један. Такођe, највећи део онога горе се одбацује, зато што је само платформа за штампање. Активни део је само онај танак гребен.
1 poen










-
Trenutno na sajtu 2 članova, 1 Skrivenih, 69 Gosta (Pogledaj celu listu)
-
Forumska statistika
9.2k
Ukupan broj tema452.2k
Ukupan broj objava -
Statistika članovȃ
3017
Svi članovi5071
Najviše na sajtu